Shenzhen Tongcheng Automation Equipment Co., Ltd
QQ:443231019
Phone:0755-33199429
Cell phone:13823266293 Mr.Rao
18128639712 Mr.Chen
Email:
472233169@qq.com Mr.Rao
1249785244@qq.com Mr.Chen
Ministry of Foreign Trade:
Lily Mob/Wechat/WhatsAPP
/Facebook/X : +86 18772968620
Email : 2413092183@qq.com
Website:www.toolcen.com
Factory Address: No.4 Rongzhong Road, Chencun Community, Humen Town, Dongguan City, Guangdong Province, China.
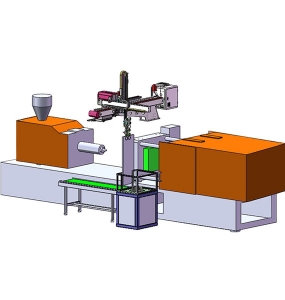
The composition of the lathe manipulator
The manipulator is mainly composed of three main parts: the actuator, the driving mechanism and the control system. The hand is used to hold parts of workpiece (or tool), and there are many structural forms based on the shape, size, weight, material and operation requirements of the grabbed object, such as clamping type, holding type and adsorption type. The movement mechanism enables the hand to complete various movements (swinging), movement or compound movement to achieve the prescribed action, and changes the position and position of the captured object. The lifting, expansion and rotation of the motion mechanism are called the freedom of the manipulator. In order to capture any object in any position and orientation in the space, 6 degrees of freedom are required. The degree of freedom is the key parameter for the design of a manipulator. The more the degree of freedom, the greater the flexibility of the manipulator, the wider the generality, and the more complex its structure. The general special manipulator has 2~3 degrees of freedom. The control system is through the control of the motor of each degree of freedom of the manipulator to complete the specific action. At the same time, the feedback information of the sensor is received to form a stable closed loop control. The core of the control system is usually composed of micro control chips such as single chip computer or DSP, and the function is realized by programming it.