Shenzhen Tongcheng Automation Equipment Co., Ltd
QQ:443231019
Phone:0755-33199429
Cell phone:13823266293 Mr.Rao
18128639712 Mr.Chen
Email:
472233169@qq.com Mr.Rao
1249785244@qq.com Mr.Chen
Ministry of Foreign Trade:
Lily Mob/Wechat/WhatsAPP
/Facebook/X : +86 18772968620
Email : 2413092183@qq.com
Website:www.toolcen.com
Factory Address: No.4 Rongzhong Road, Chencun Community, Humen Town, Dongguan City, Guangdong Province, China.
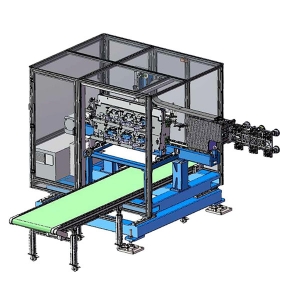
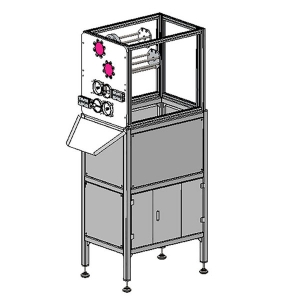
Classification of lathe manipulator
The types of the manipulator, according to drive mode can be divided into hydraulic, pneumatic, electric and mechanical manipulator; according to the applicable scope can be divided into special manipulator and generalmanipulator two; according to the trajectory control mode can be divided into position control and continuous trajectory control robot. Manipulator is usually used as an additional device for machine tools or other machines, such as loading and unloading workpiece and transferring tools on automatic machine or automatic production line. There is no independent control device in machining center. Some operating devices need to be manipulated directly by people, such as the master and slave manipulators used in the atomic energy department to operate dangerous goods, also often called mechanical hands. The application of the manipulator in the forging industry can further develop the production capacity of the forging equipment and improve the working conditions such as heat and fatigue.


The manipulator was first developed from the United States. In 1958, the United States consolidated Control Inc developed the first manipulator.